


-

Слайди тағирёбандаи PT
Ҷадвали слайдҳои тағирёбандаи PT дар чаҳор модел мавҷуд аст, ки тарҳи хурд ва сабук дорад, ки соатҳои зиёд ва насбро кам мекунад ва нигоҳдорӣ ва васл кардан осон аст. Онро барои иваз кардани ашё дар ҳама масофа, барои интиқоли бисёрнуқтаҳо, дар як вақт дар масофаи баробар ё нобаробар гирифтан ва ҷойгир кардани ашё ба паллетҳо / тасмаҳои конвейерӣ / қуттиҳо ва асбобҳои санҷишӣ ва ғайра истифода бурдан мумкин аст.
-

HSRA Баландии силиндраи барқии баланд
Ҳамчун як маҳсулоти нави ҳамгироии механикӣ ва электрикӣ, силиндраи барқии HSRA servo ба ҳарорати муҳити зист ба осонӣ таъсир намерасонад ва метавонад дар ҳарорати паст, ҳарорати баланд, борон истифода шавад. Цилиндраи барқӣ ҷузъҳои интиқоли дақиқи интиқолро ба монанди винти дақиқи тӯб ё винти ғалтаки сайёраро қабул мекунад, ки бисёр сохторҳои механикии мураккабро сарфа мекунад ва самаранокии интиқоли он хеле беҳтар шудааст.
-
Фаъолкунандаи Axis ZR
Фаъолкунандаи меҳвари ZR як навъи гардонандаи мустақим аст, ки дар он муҳаррики холӣ винти тӯб ва гайкаи сплайнро мустақиман меронад, ки дар натиҷа шакли паймон пайдо мешавад. Муҳаррики меҳвари Z барои гардиши гайкаи винти тӯбӣ барои ноил шудан ба ҳаракати хатӣ ронда мешавад, ки дар он гайкаи сплайн ҳамчун сохтори таваққуф ва роҳнамо барои чоҳи винт амал мекунад.
-

Фаъолкунандаи як меҳвари пурра басташуда
Насли нави KGG муҳаррикҳои мукаммали ягонаи як меҳвар пеш аз ҳама ба тарҳи модулӣ асос ёфтааст, ки винтҳои тӯбӣ ва дастурҳои хатиро муттаҳид мекунад ва ба ин васила дақиқии баланд, имконоти насби зуд, сахтии баланд, андозаи хурд ва хусусиятҳои сарфаи ҷойро пешниҳод мекунад. Ба сифати сохтори гардонанда винтҳои тӯби дақиқи баланд истифода мешаванд ва релсҳои ба таври оптималӣ тарҳрезишуда ҳамчун механизми роҳнамо барои таъмини дақиқӣ ва сахтӣ истифода мешаванд. Ин беҳтарин интихоб барои бозори автоматизатсия аст, зеро он метавонад фазо ва вақти талабкардаи муштариро ба таври назаррас коҳиш диҳад ва ҳангоми қонеъ кардани насби сарбории уфуқӣ ва амудии муштарӣ ва инчунин метавонад дар якҷоягӣ бо меҳварҳои сершумор истифода шавад.
-

KGX Фаъолкунандаи хаттии баланд
Ин силсила хусусиятҳои винтӣ, хурд, сабук ва сахтгирии баланд мебошад. Ин марҳила дорои модули чархзании мотордор мебошад, ки бо рахи сарпӯши аз пӯлоди зангногир муҷаҳҳаз шудааст, то ворид шудан ё баромадани зарраҳоро пешгирӣ кунад.
-

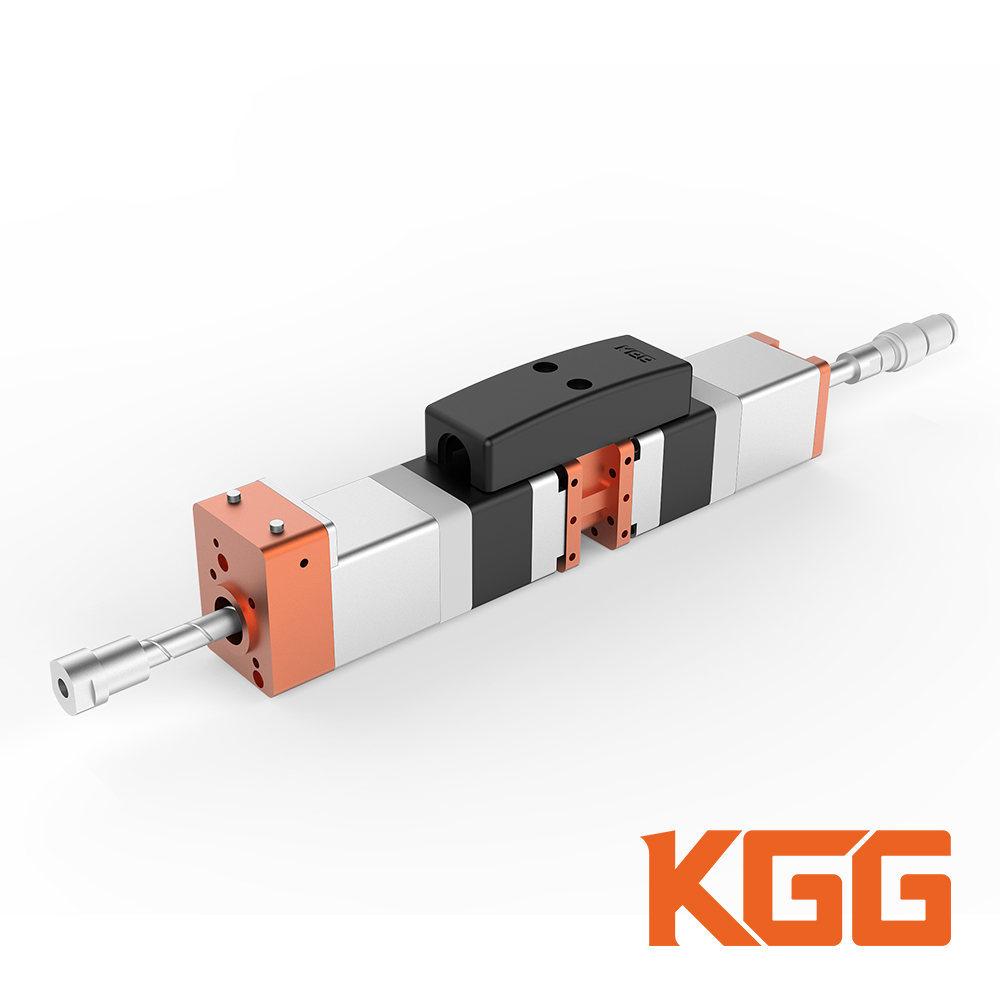
HST дарунсохти роҳнамоии фаъолкунандаи хатӣ
Ин силсила бо винт идора карда мешавад, бо хусусиятҳои пурра пӯшида, хурд, сабук ва сахтгирии баланд. Ин марҳила дорои модули экипажи тӯбҳои моторӣ мебошад, ки бо рахи сарпӯши аз пӯлоди зангногир муҷаҳҳаз шудааст, то ворид шудан ё баромадани зарраҳоро пешгирӣ кунад.




