
-

Слайди тағирёбандаи PT
Ҷадвали слайдҳои тағирёбандаи PT дар чаҳор модел мавҷуд аст, ки тарҳи хурд ва сабук дорад, ки соатҳои зиёд ва насбро кам мекунад ва нигоҳдорӣ ва васл кардан осон аст. Онро барои иваз кардани ашё дар ҳама масофа, барои интиқоли бисёрнуқтаҳо, дар як вақт дар масофаи баробар ё нобаробар гирифтан ва ҷойгир кардани ашё ба паллетҳо / тасмаҳои конвейерӣ / қуттиҳо ва асбобҳои санҷишӣ ва ғайра истифода бурдан мумкин аст.
-

HSRA Баландии силиндраи барқии баланд
Ҳамчун як маҳсулоти нави ҳамгироии механикӣ ва электрикӣ, силиндраи барқии HSRA servo ба ҳарорати муҳити зист ба осонӣ таъсир намерасонад ва метавонад дар ҳарорати паст, ҳарорати баланд, борон истифода шавад. Цилиндраи барқӣ ҷузъҳои интиқоли дақиқи интиқолро ба монанди винти дақиқи тӯб ё винти ғалтаки сайёраро қабул мекунад, ки бисёр сохторҳои механикии мураккабро сарфа мекунад ва самаранокии интиқоли он хеле беҳтар шудааст.
-
Фаъолкунандаи Axis ZR
Фаъолкунандаи меҳвари ZR як навъи гардонандаи мустақим аст, ки дар он муҳаррики холӣ винти тӯб ва гайкаи сплайнро мустақиман меронад, ки дар натиҷа шакли паймон пайдо мешавад. Муҳаррики меҳвари Z барои гардиши гайкаи винти тӯбӣ барои ноил шудан ба ҳаракати хатӣ ронда мешавад, ки дар он гайкаи сплайн ҳамчун сохтори таваққуф ва роҳнамо барои чоҳи винт амал мекунад.
- Дараҷаи дақиқии силсилаи GLR (винти ягонаи чормағз бо риштаи метрӣ) ба C5, Ct7 ва Ct10 (JIS B 1192-3) асос ёфтааст. Мувофиқи дараҷаи дақиқӣ, бозии Axial 0,005 (Preload: C5), 0,02 (Ct7) ва 0,05 мм ё камтар (Ct10). Силсилаи GLR (винти ягонаи чормағз бо риштаи метрӣ) аз маводи винти чоҳи винт S55C (сахтшавии индуксионӣ), маводи чормағз SCM415H (карбюризатсия ва сахтшавӣ), сахтии сатҳи қисми винти тӯб HRC58 ё баландтар аст. Шакли охири чоҳи силсилаи GLR (винти ягонаи чормағз бо...
-

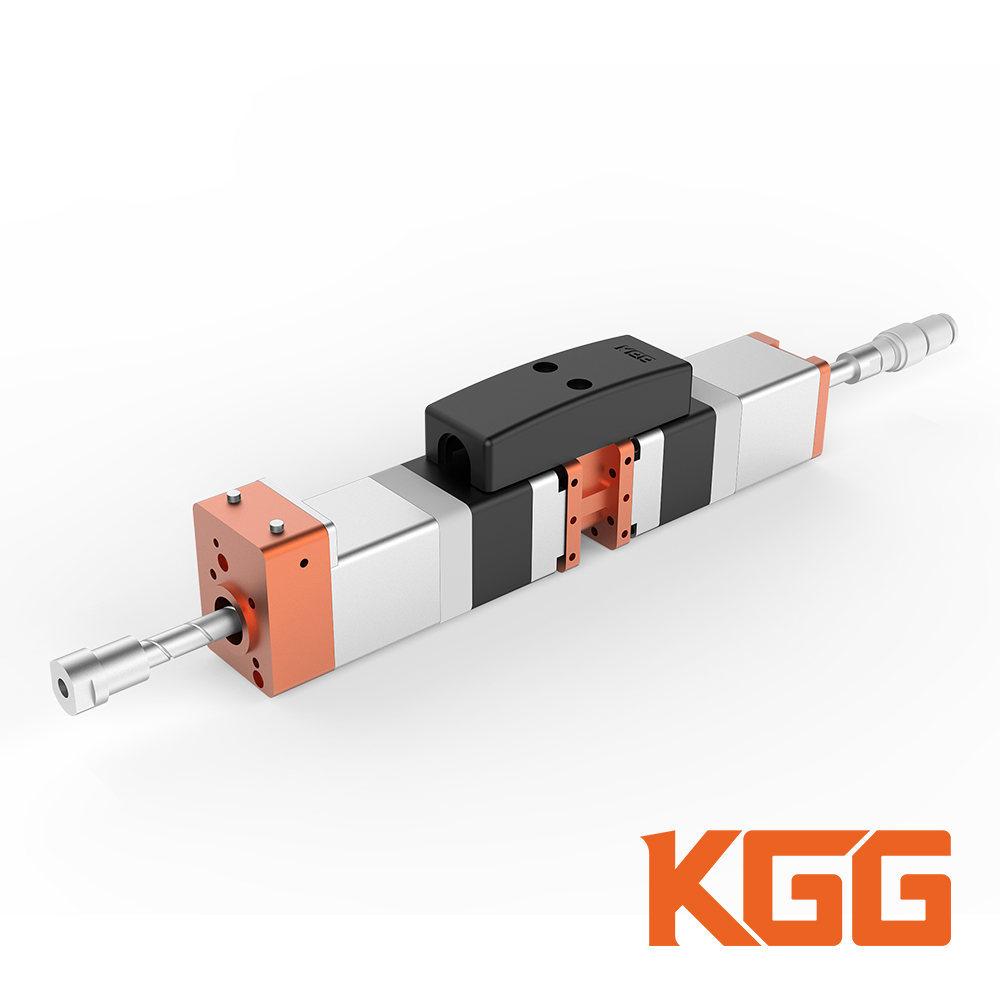
Фаъолкунандаи як меҳвари пурра басташуда
Насли нави KGG муҳаррикҳои мукаммали ягонаи як меҳвар пеш аз ҳама ба тарҳи модулӣ асос ёфтааст, ки винтҳои тӯбӣ ва дастурҳои хатиро муттаҳид мекунад ва ба ин васила дақиқии баланд, имконоти насби зуд, сахтии баланд, андозаи хурд ва хусусиятҳои сарфаи ҷойро пешниҳод мекунад. Ба сифати сохтори гардонанда винтҳои тӯби дақиқи баланд истифода мешаванд ва релсҳои ба таври оптималӣ тарҳрезишуда ҳамчун механизми роҳнамо барои таъмини дақиқӣ ва сахтӣ истифода мешаванд. Ин беҳтарин интихоб барои бозори автоматизатсия аст, зеро он метавонад фазо ва вақти талабкардаи муштариро ба таври назаррас коҳиш диҳад ва ҳангоми қонеъ кардани насби сарбории уфуқӣ ва амудии муштарӣ ва инчунин метавонад дар якҷоягӣ бо меҳварҳои сершумор истифода шавад.
-

Виддаҳои тӯб бо Spline Ball
KGG ба гибридӣ, паймон ва сабук тамаркуз кардааст. Виддаҳои тӯбӣ бо Балл Сплайн дар чоҳи винти шарикӣ коркард карда мешаванд, ки ин имкон медиҳад, ки ба таври хаттӣ ва гардиш ҳаракат кунанд. Илова бар ин, функсияи нафаскашии ҳаво тавассути холигоҳи сӯрох мавҷуд аст.
-

Виддаҳои пешқадам бо чормағзҳои пластикӣ
Ин силсила аз ҷониби омезиши чоҳи зангногир ва чормағзи пластикӣ муқовимати хуби зангзанӣ доранд. Ин нархи оқилона аст ва барои интиқол бо бори сабук мувофиқ аст.
-

Screw Ball Precision
Буридани тӯби дақиқи KGG тавассути раванди суфтакунии шпиндели винтӣ сохта мешавад. Экипажҳои дақиқи тӯбҳои заминӣ дақиқии баланди ҷойгиршавӣ ва такроршавандагӣ, ҳаракати ҳамвор ва мӯҳлати хизмати дарозро таъмин мекунанд. Ин винтҳои пурсамари тӯб ҳалли комил барои барномаҳои гуногун мебошанд.
Хуш омадед ба вебсайти расмии Shanghai KGG Robots Co., Ltd.
Маҳсулот
-

боло




