
Ҷузъҳои ҳаракати хаттӣ барои ноил шудан ба ҳаракати назоратшаванда ва дақиқ дар барномаҳои бешумори саноатӣ муҳиманд. Аз ҷумлаи технологияҳои асосие, ки инро имконпазир мегардонанд, инҳоянд:рельсҳои роҳнамои хаттӣва хаттӣ подшипникҳо.Гарчанде ки ҳарду ба мақсади асосии мусоидат ба ҳаракати хаттӣ хизмат мекунанд, онҳо аз ҷиҳати сохт, хусусиятҳои амалиётӣ ва ҳолатҳои идеалии истифодаи худ ба таври назаррас фарқ мекунанд.
I. Релсҳои роҳнамои хаттӣ: Барои дақиқӣ ва сахтӣ тарҳрезӣ шудаанд
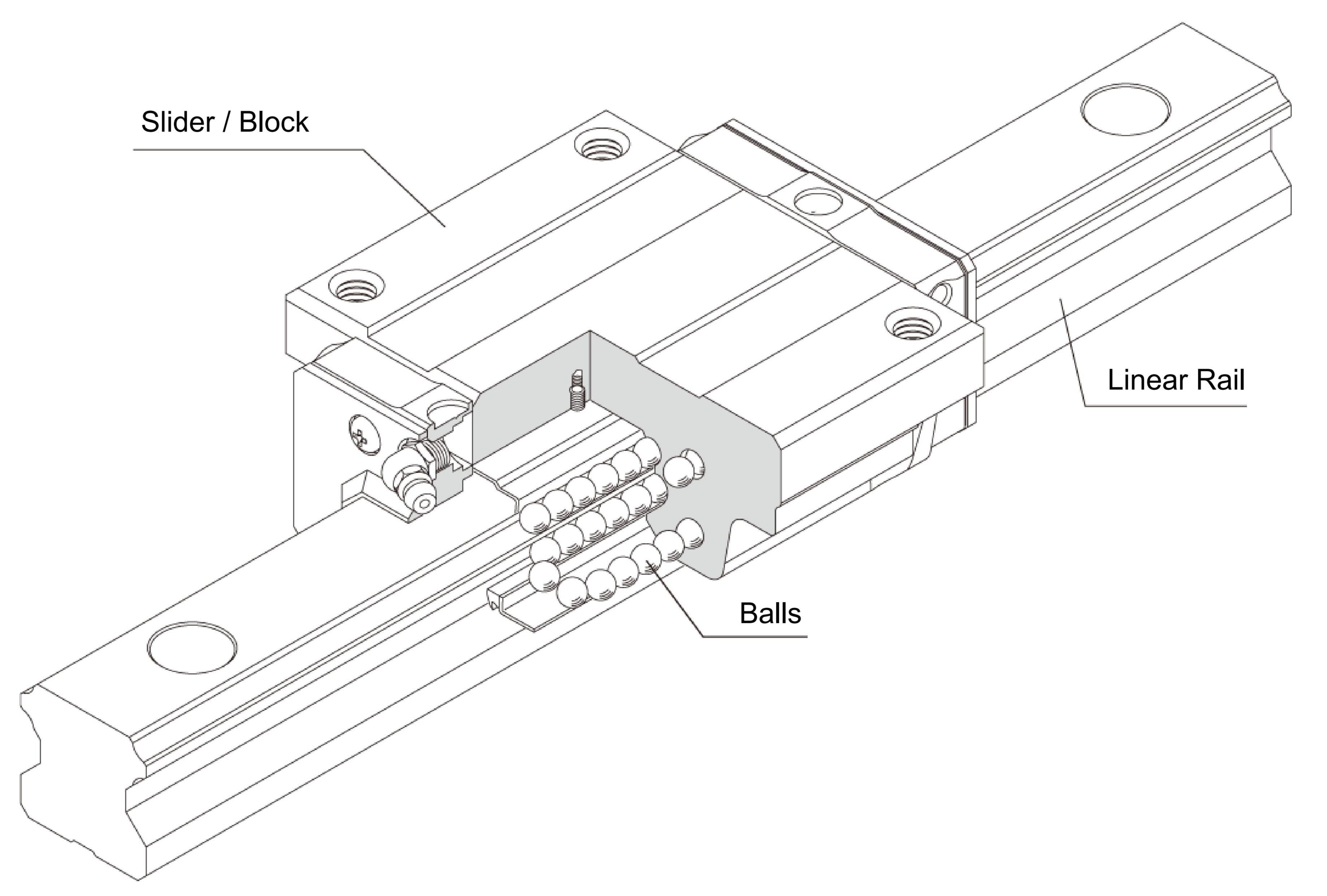
Хаттӣрельсҳои роҳнамо, ки бо номи роҳнамоҳои ҳаракати хаттӣ ё рельсҳои лағжанда низ маълуманд, як роҳи ҳалли мураккаб барои ҳаракати хаттии баландсифат мебошанд. Тарҳи онҳо одатан як рельси сахт ва як блоки лағжанда (ароба)-ро дар бар мегирад, ки унсурҳои ғалтаки гардишкунандаро ба монанди тӯбҳо ё ғалтакҳо дар бар мегирад. Ин конфигуратсия соишро кам мекунад ва имкон медиҳад, ки ҳаракати хеле ҳамвор, дақиқ ва устувор анҷом дода шавад. Системаҳое, ки бо роҳҳои роҳнамои хаттии дақиқ сохта шудаанд, ба монанди онҳое, ки аз ҷониби KGG пешниҳод мешаванд, бо иқтидори баланди боркунӣ, сахтии барҷаста ва дақиқии баланди ҷойгиркунии худ машҳуранд. Дар натиҷа, онҳо интихоби бартарӣ барои барномаҳои серталаб, аз ҷумла марказҳои коркарди CNC, таҷҳизоти истеҳсолии нимноқилҳо, робототехникаи саноатӣ ва дигар системаҳои автоматикунонии баландсифат мебошанд, ки дар онҳо каҷравии ҳадди ақал ва назорати дақиқи ҳаракат муҳиманд.

II. Подшипникҳои хаттӣ: Ҳалли компакт барои ҳаракати соддатар
Подшипникҳои хаттӣ усули асосӣтар ва аксар вақт фишурдатарро барои ноил шудан ба ҳаракати хаттӣ фароҳам меоранд. Тарҳи маъмул корпуси берунии силиндрӣ, ки дорои остинчаи дарунии дорои соиш ё гардиши такрорӣ мебошад, мебошад.подшипникҳои курашакл,ки дар паҳлӯи чоҳи пӯлоди сахтшуда (рели мудаввар) лағжида меравад. Ин сохтор одатан нисбат ба системаи рели роҳнамои хаттӣ соддатар ва аз ҷиҳати фазо самараноктар аст. Подшипникҳои хаттӣ дар барномаҳое, ки ҳаракати хаттии ҳамвор ва арзонро талаб мекунанд, дар он ҷо дақиқии ултрабаланд ва сахтии шадид нигарониҳои асосӣ нестанд, бартарӣ доранд. Онҳо ба таври васеъ дар системаҳои конвейерӣ, мошинҳои бастабандӣ, дастгоҳҳои коркарди мавод ва вазифаҳои гуногуни автоматикунонии умумӣ истифода мешаванд, ки аз осонии насб ва нигоҳдории онҳо баҳра мебаранд.

III. Фарқиятҳои калидӣ байни ин ду технология
1. Идоракунии бор ва устувории сохторӣ
Тафовути асосии сохторӣ дар минтақаи тамос аст. Хаттӣ рельсҳои роҳнамотамоси сатҳи калонро (тавассути рельс ва блок) истифода мебаранд, ки борҳоро дар масоҳати васеътар тақсим мекунад, ки боиси иқтидори хеле баланди боркунӣ (ҳам борҳои радиалӣ ва ҳам моментӣ) ва сахтии истисноӣ мегардад. Подшипникҳои хаттӣ, ки аксар вақт ба тамос бо нуқта ё хат бо меҳвари мудаввар асос ёфтаанд, табиатан иқтидори пасттари боркунӣ ва сахтиро пешниҳод мекунанд, ки онҳоро барои истифода бо борҳои вазнин ё қувваҳои қавии печиш камтар мувофиқ мегардонад.
2. Дақиқӣ ва дақиқии амалиётӣ
Ба шарофати сохтори сахт ва истеҳсоли дақиқи худ, релсҳои роҳнамои хаттӣ қодиранд сатҳи хеле баланди параллелизми ҳаракаткунанда, ростӣ ва такроршавандагии мавқеъро таъмин кунанд. Онҳо барои барномаҳое тарҳрезӣ шудаанд, ки дар онҳо дақиқии сатҳи микрон муҳим аст. Подшипникҳои хаттӣ, дар ҳоле ки ҳаракати ҳамворро таъмин мекунанд, одатан наметавонанд бо ин сатҳи дақиқӣ мувофиқат кунанд ва бо барномаҳое, ки таҳаммулпазирии дақиқии бештар доранд, беҳтар мутобиқ карда мешаванд.
3. Суръат ва самаранокии соиш
Подшипникҳои хаттӣ, ки одатан тарҳи дохилии соддатар ва массаи ҳаракаткунандаи пасттар доранд, аксар вақт муқовимати каме пасттари ғелондашавиро нишон медиҳанд. Ин метавонад онҳоро барои баъзе замимаҳои хеле баландсуръат муфид гардонад. Релсҳои роҳнамои хаттӣ, дар ҳоле ки самаранокии баланд доранд, барои беҳтар кардани тавозуни суръат, дақиқӣ ва иқтидори боркунӣ тарҳрезӣ шудаанд ва баъзан устувориро аз суръати ниҳоӣ авлавият медиҳанд.
4. Мутобиқати экологӣ ва нигоҳдорӣ
Подшипникҳои хаттӣ, махсусан навъҳои пӯшида ё худтанзимшаванда, метавонанд ба ифлосшавии чанг ва партовҳо муқовимати хуб нишон диҳанд. Бисёре аз системаҳои роҳи оҳани роҳнамои хаттӣ, аз сабаби унсурҳои ғелонда ва чуқурчаҳои дақиқи худ, ба воридшавии зарраҳо осебпазиртаранд ва аксар вақт мӯҳрҳо ё сильфонҳои муҳофизатӣ талаб мекунанд, ки онҳоро барои муҳитҳои тозатар ё назоратшаванда беҳтарин мувофиқ мегардонад. Аммо, ҳарду намуд дар вариантҳои мӯҳршуда барои шароити сахт дастрасанд.
Хулоса, интихоб байни рельсҳои роҳнамои хаттӣ ва подшипникҳои хаттӣ аз талаботи мушаххаси истифода вобаста аст. Рельсҳои роҳнамо роҳи ҳал барои борҳои вазнин, дақиқии баланд ва сахтии ҳадди аксар мебошанд. Подшипникҳои хаттӣ як варианти паймон, иқтисодӣ ва самаранокро барои барномаҳои сабуктар, суръати баланд ё маҳдуди фазо пешниҳод мекунанд. Бо зиёда аз даҳ соли тахассус дар ҳаракати дақиқи хаттӣ, KGG барои ҳарду технология роҳҳои ҳал ва маҳсулоти коршиносонро пешниҳод мекунад ва дар интихоби ҷузъи беҳтарин барои ниёзҳои таҷҳизоти шумо кӯмак мерасонад.
For more detailed product information, please email us at amanda@kgg-robot.com or call us: +86 15221578410.

Навиштааст Ирис.
Хабарҳои фаврӣ: Ояндаи дақиқӣ фаро расидааст!
Ҳамчун як эҷодкунандаи хабарҳои блог дар ҷаҳони мошинсозӣ, автоматизатсия ва робототехникаи инсонӣ, ман ба шумо охирин хабарҳоро дар бораи винтҳои хурди тӯбӣ, иҷрокунандаҳои хаттӣ ва винтҳои ғалтакӣ - қаҳрамонони ношинохтаи муҳандисии муосир - пешкаш мекунам.
Вақти нашр: 06 январи соли 2026




